From holding a ball to daintily greedy a chopstick, a brand new robotic hand developed by scientists within the UK can seize a spread of objects simply by shifting its wrist and the sensation of its “skin”.
The 3D-printed appendage is designed to be low-cost and energy-efficient, able to finishing up advanced actions regardless of not having the ability to use every finger independently.
Professor Fumiya Iida, of the University of Cambridge‘s Bio-Inspired Robotics Laboratory, stated the aim was to “simplify the hand as much as possible”.
Most superior robots able to feats just like the human hand have absolutely motorised fingers, making them harder and costly to supply.
But this cheaper various has proved remarkably succesful throughout greater than 1,200 checks – together with realizing how a lot strain to use to a given object.
More science and tech information:
AI-generated newsreader debuts
China will get one other ChatGPT rival
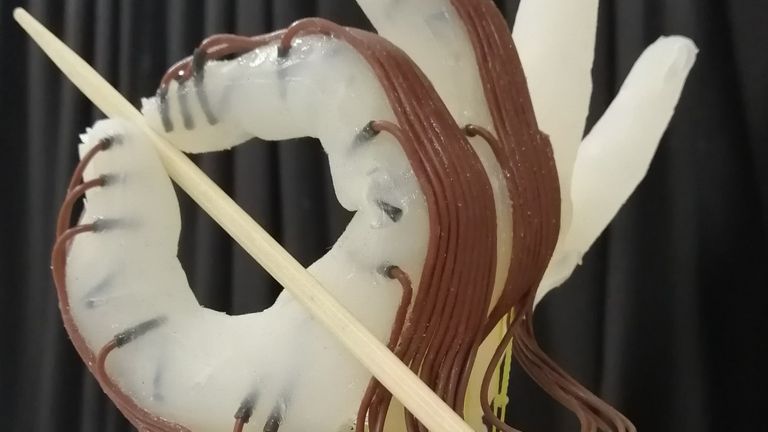
A robotic hand daintily wielding a chopstick. Pic: University of Cambridge
‘Robot pores and skin’ helps decide wanted drive
While it’s best to instinctively know to softly deal with an egg with out shattering it and ruining breakfast, robots would require coaching to recognise the correct quantity of drive required.
In this case, researchers implanted the hand with sensors so it may sense what it was touching.
It used trial and error to study what sorts of grip would achieve success – beginning with balls after which shifting on to the whole lot from peaches and bubble wrap to a pc mouse.
Study co-author Dr Thomas George-Thuruthel, now of University College London, stated the sensors have been “sort of like the robot’s skin”.
“We can’t say exactly what information the robot is getting,” he added, “but it can theoretically estimate where the object has been grasped and with how much force.”
The robotic also can predict whether or not it was going to drop an object, and adapt accordingly.
Researchers hope the robotic hand may very well be improved additional, corresponding to including laptop imaginative and prescient capabilities and educating it to use its environment to know a wider vary of objects.
The outcomes are reported within the journal Advanced Intelligent Systems.
Content Source: information.sky.com